Quick Setup
In order to show how a actuator can be easily connected and used, we are assuming that we have a NH-S2 100 Gear Ratio actuator. We will be using NLink Adapter to connect the driver to PC running NMotion CLI tool in Linux (note there won't be any changes in the Windows case as well). We will use the tool to configure and run the actuator
Connection
- Connect the XT30 power connector (Don't hotplug, make sure that the power is OFF).
- Plug in the CAN Bus connections and connect this to NLink Adapter and then connect the Adapter to PC's USB Interface.
CLI Tool Setup
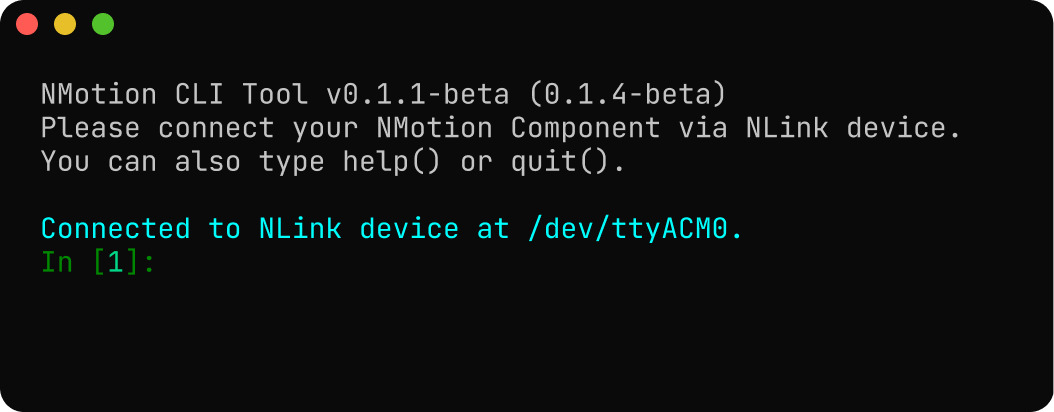
Start the NMotion CLI tool, and plug in your NLink Adapter.
Now turn on your power to the actuator. The actuator will then move incrementally in clockwise and counter clockwise directions to complete the startup calibration process.
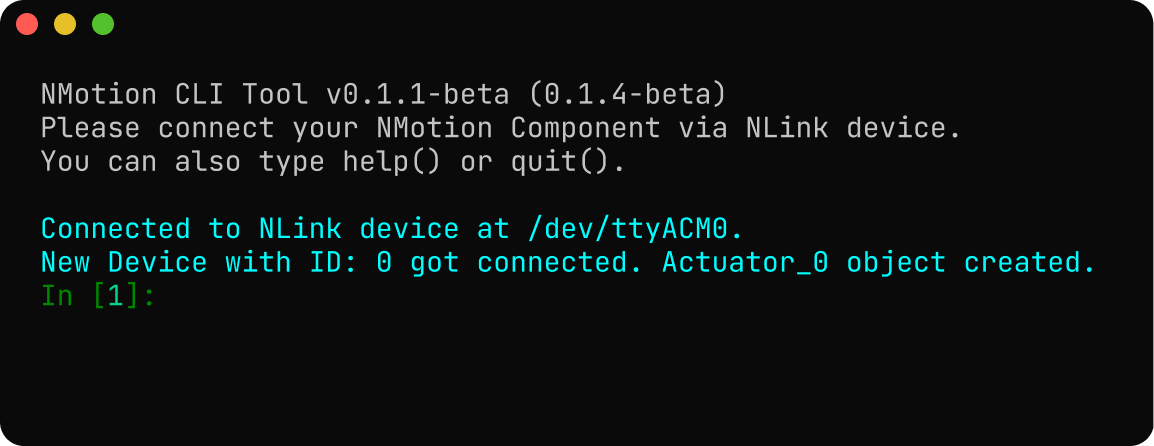
Now you can use the Actuator_0 object to call the relevant Actuator APIs in Python to run and configure the actuator.
Configuring the Driver
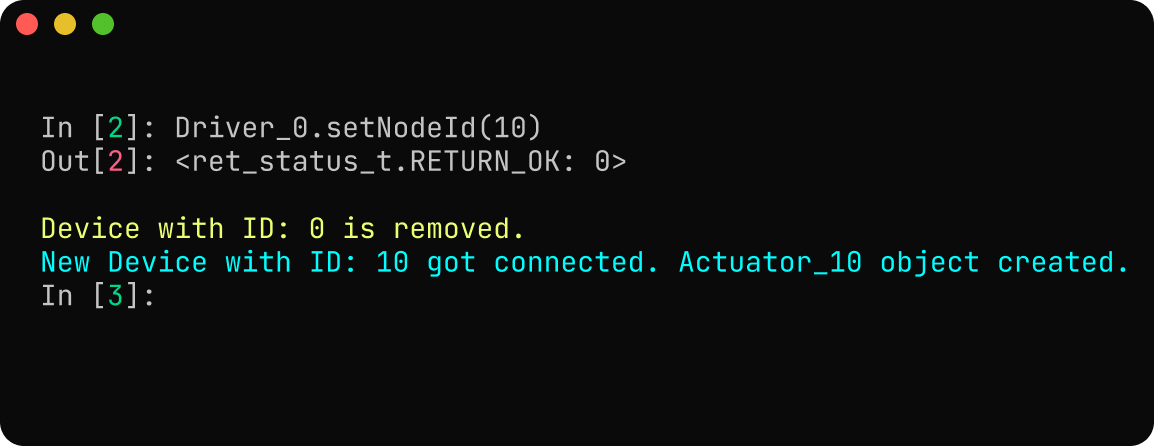
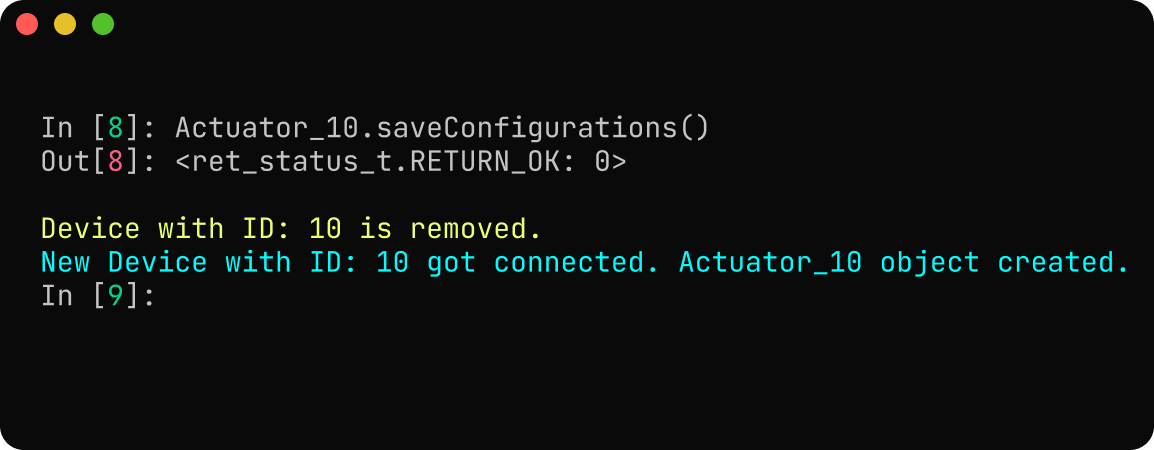
- CAN Bus Configuration: Update the CAN Node ID of the actuator from default value of 0 to 10. On setting the CAN Node ID the device will automatically reboot, which will make the
Actuator_0object to be deleted automatically and creata a newActuator_10object for the driver.
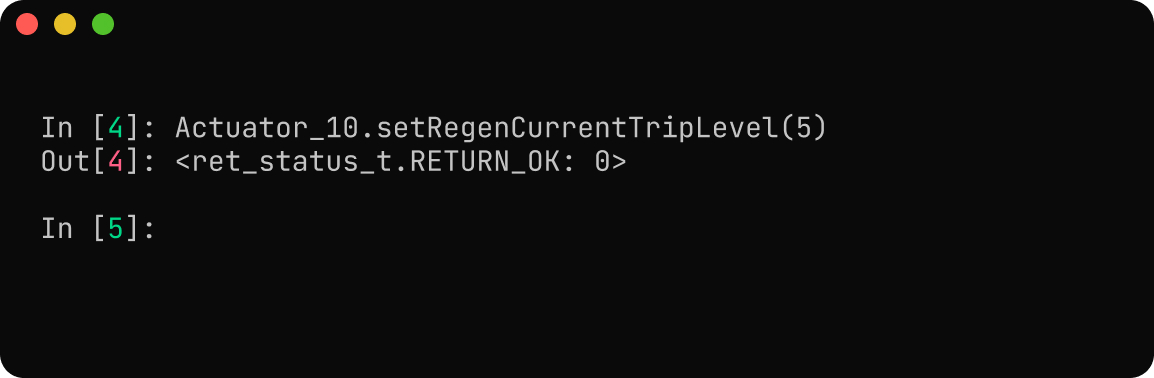
- Power Configuration: Since we are using a 48V actuator, the default values of under voltage trigger level (10 V) and over voltage trigger level (56 V) is fine. We will set the max regeneration current trigger level to 5 A, which the power supply could handle (make sure to check if your power supply could handle the same, it can vary from power supply to power supply).
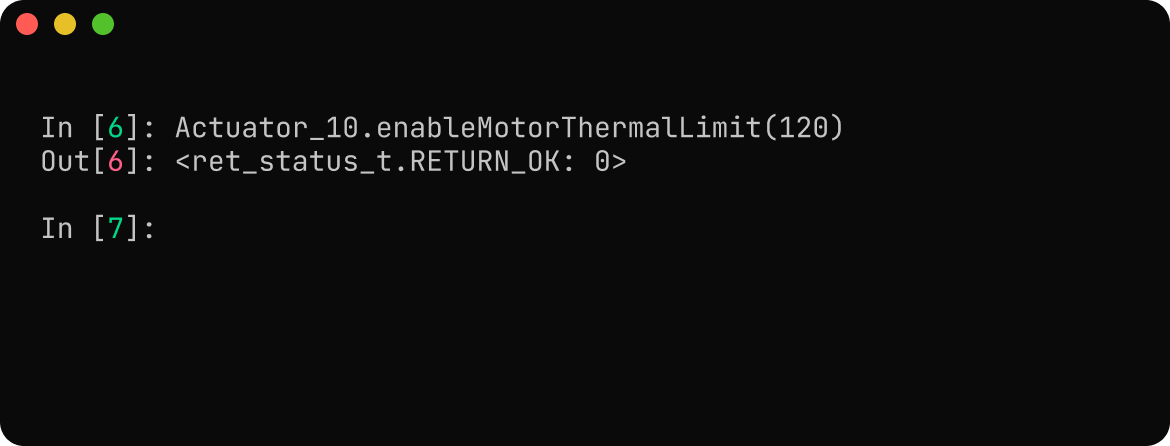
- Thermal Limit Configuration: Set the upper limit for the motor temperature.
- Save Configuration: After configuring all the parameters we need to do a save configuration call to make sure all the parameters are set.
Running the Motor
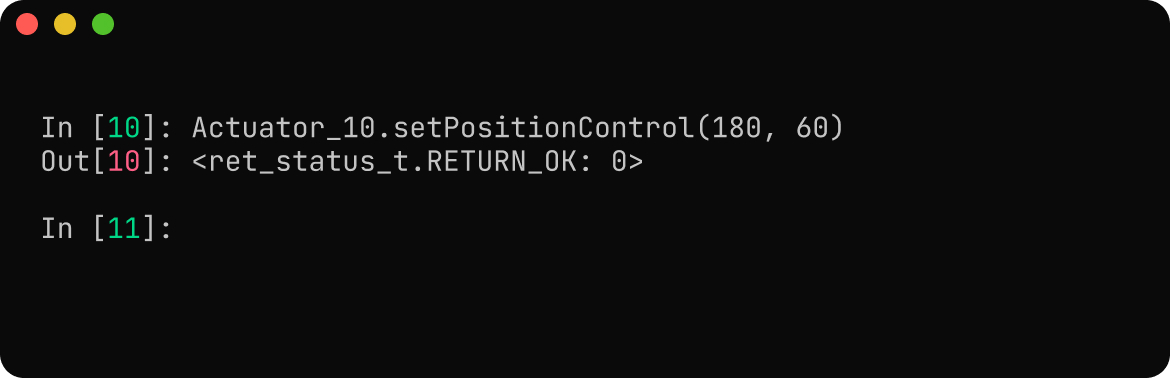
The actuator can be run in various control modes as necessary. Here, we will be running the actuator to a position of 180 degrees at a velocity of 60 degrees per second.
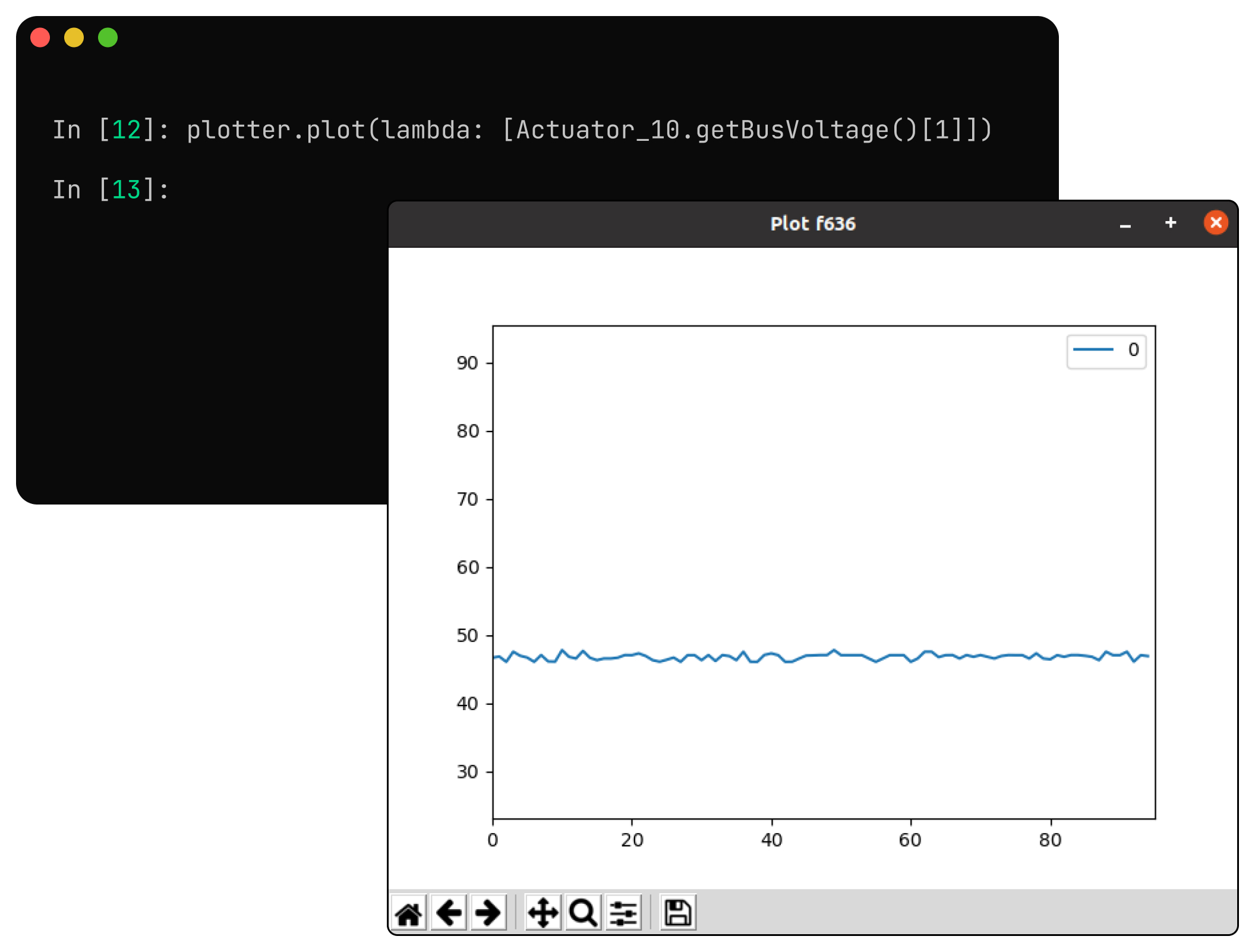
One can also plot the real-time data using the CLI tool as well.
Shutting Down
To shut down the actuator properly, we can command the actuator to come to an idle state and then we can safely turn OFF the driver afterwards.
