NCoder CAN
The NCoder is a modular encoder system that combines high-resolution angular position encoder unit with user-friendly software tools, enabling precise motion tracking and simplified integration into a wide range of control applications. With a built-in CAN interface, the NCoder connects seamlessly to the NLink Adapter, providing full control and effortless configuration through our intuitive Software SDKs.
Specifications
- 12-48 V DC Input Voltage
- External SPI Interface to connect the encoder module.
- External encoder board provides more flexible mounting options for encoder.
- Can output various encoder data points: Position, velocity, acceleration and angular position.
- Scaled, filtered velocity and acceleration outputs available from the encoder.
- Flexible support for multiple SPI-based encoder modules such as NCoder 732 & NCoder 600.
- Onboard USB-C port enables standalone operation for NCoder device.
- CAN 2.0B upto 1Mbps
- Has Daisy Chainable CAN Bus Interface. Provides hassle free connection with other CAN components including our NMotion Components.
- Can be easily configured & controlled by using our Python / C++ SDKs and NMotion CLI Tool.
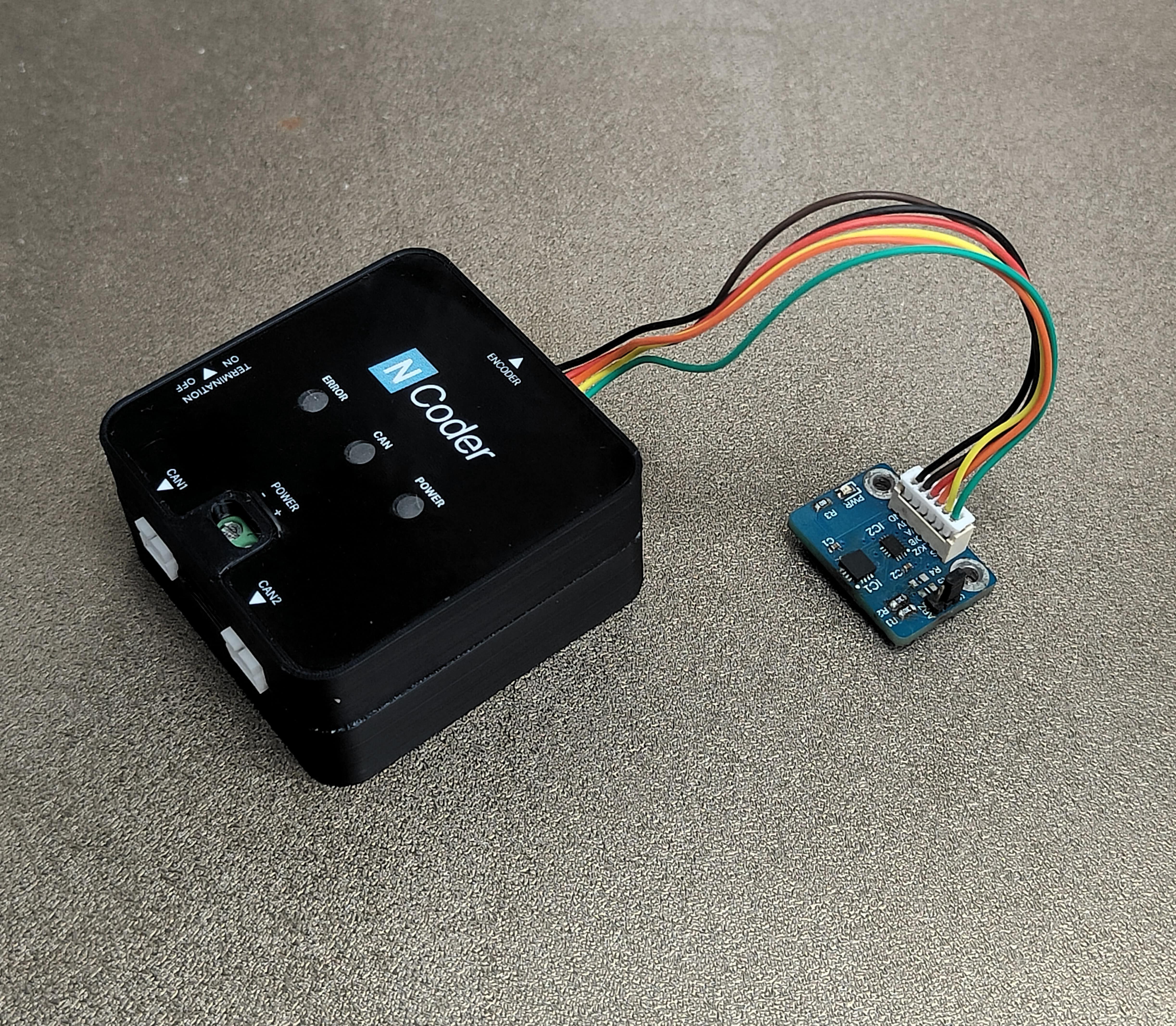
Two-Part Architecture
The NCoder system consists of two main hardware components, designed to offer flexible mounting options for a wide range of applications:
- Sensor Element – A high-resolution external magnetic encoder responsible for precise position measurement.
- Control Shield – A power and communication interface that manages configuration, transmits data over CAN, and handles control and position data processing.

More Details
Pinouts, Connections & Drawings
Setting up the Driver and Operation
Connect a motor, quickly set it up and run it with the driver
C++ & Python SDK
Customisation
We can also provide encoder solutions based on your requirements. These customisations can be done at a reasonable cost. Our team of experts will help you to achieve your objectives within the constraints of your application. Please contact us to initiate a consultation.